Einen großen Dank möchte ich an dieser Stelle an
www.philohome.com aussprechen.
Mir wurde gestattet, die komplette
Seite zu übersetzen und hier einzubauen.
Eine großartige Homepage zum Thema LEGO findet Ihr dort, also unbedingt einmal
besuchen.
Lego® 9V Technic Motoren Eigenschaften-Vergleich



Siehe auch diese
Vergleichsseite.
Thomas Avery hat auch die Maße der 5292 motors, siehe auch
Lugnet thread.
Das Register
 |
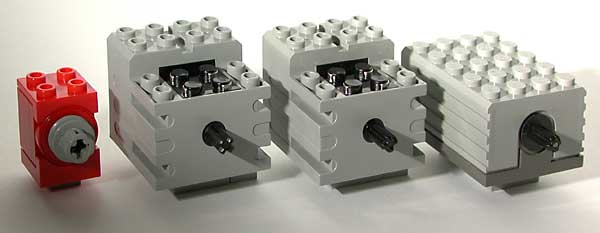
Electric Technic Motor 9V
Der ältere 9V Technik Motor (1990). Unübersetzt, hat |
 |
Electric Technic Micromotor
1993 erschienen ist dieser kleine, leichtgewichtige |
 |
Electric Technic Mini-Motor 9v
Seit 1997 ersetzt dieser Motor den 2838. Untersetzt |
 |
Electric Technic Mini-Motor 9v
Lego 43362 Im Jahr 2002 ersetzt Lego den 71427 Motor mit einer |
 |
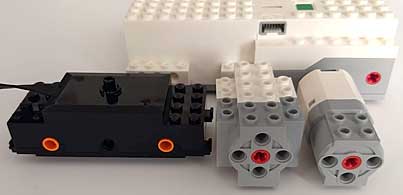
Electric RC Race Buggy Motor
Im Jahr 2002 eingeführt, erschien dieser Motor mit |
 |
Electric Technic Motor 9V Übersetzt
Dieser Motor wurde erstmals im |
 |
NXT Motor
Dieser Motor ist speziell für die NXT-Serie (2006). |
 |
Power-Funktions E-MotorDer mit dem LEGO Education Add-On-Set für erneuerbare Energien (9688) eingeführte Motor zeichnet sich dadurch aus, dass er leicht rückwärts angetrieben und als Generator verwendet werden kann. Seine hohe Geschwindigkeit kann auch in einigen Anwendungen nützlich sein. Der Wirkungsgrad ist jedoch nicht besser als bei PF-Medium, und die abgegebene mechanische Leistung beträgt etwa die Hälfte. |
 |
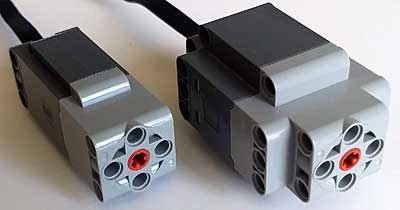
Power Functions Medium Motor
Dieser Motor gehört zu einer Reihe neuer Motoren-und |
 |
Power Functions XL Motor
Der große Bruder des Power-Funktions Medium Motor, |
 |
Power Functions Large Motor
|
 |
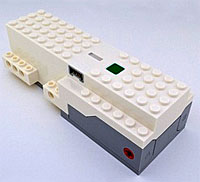
9V Eisenbahn Motor
Von Stefan Vorst gemessene Leistungen des 9V Zug |
 |
RC Eisenbahn Motor
Dieser Motor wurde eingeführt, als Lego die
|
 |
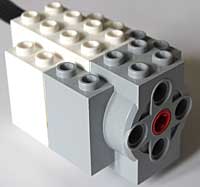
Power Functions Eisenbahn Motor
Als das Eisenbahn-System mit den Power Functions Glücklicherweise sind die Leistungen sehr verbessert |
 |
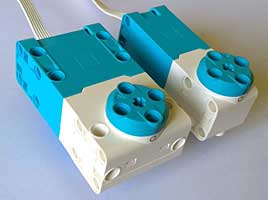
EV3 Large Motor
|
 |
EV3 Medium Motor
|
 |
Powered Up Medium Motor
|
 |
Powered Up Eisenbahn Motor
Dies ist die neue Version des Zugmotors, jedoch mit dem neuen |
 |
Boost Internal Motor Ich konnte meinen Hub öffnen und den internen Motor testen. Dieser ist ziemlich leistungsstark, aber kein Laststrom ist ziemlich hoch! |
 |
Boost External Motor
|
 |
Control+ L Motor
|
 |
Control+ XL Motor
|
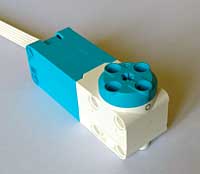 |
Spike Prime Medium-MotorDieser Motor wurde mit der Robotikplattform LEGO Education Spike Prime eingeführt. Die Achsnabe steht wie bei älteren NXT- und EV3-Motoren senkrecht zur Motorlänge. Es umfasst einen Rotationsencoder mit 1°-Auflösung und einen Absolutencoder sowie eine Markierung, mit der Sie wissen, wo sich der 0°-Winkel befindet. Es gibt ein detailliertes offizielles technisches Datenblatt, und obwohl es mit 7,2 V (Spike Prime-Spannung) spezifiziert ist, stimmt es ziemlich gut mit meinen Messungen überein. Dieser Motor ist nicht sehr leistungsstark, liefert weniger als 1 W mechanische Leistung und hat einen schlechten Wirkungsgrad. Die zahlreichen Befestigungspunkte machen den Aufbau sehr einfach. |
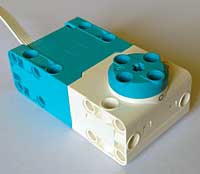 |
Spike Prime Großer Motor Dieser Motor weist viele Merkmale des mittelgroßen Motors auf (Drehgeber, einfacher Aufbau, Verfügbarkeit eines technischen Datenblatts). Es ist viel leistungsstärker als sein mittelgroßes Gegenstück (fast 2 W mechanische Leistung). Die tatsächliche Dauerleistung wird jedoch durch den Motortreiberchip in der Nabe begrenzt. Beachten Sie, dass die interne rücksetzbare Sicherung ziemlich hoch ausgelegt zu sein scheint. Ich konnte sie einige Zeit lang mit einem Strom von 900 mA verwenden. |
Gewicht
 2838 |
 2986 |
 71427 |
 43362 |
 5292 |
 47154 |
 NXT |
 E-Motor |
 PF Medium |
 PF XL |
 9V Train |
 RC Train |
| 48g | 10g | 42g | 28g | 55g | 40g | 80g | 50g | 31g | 69g | 72g | 53g |
 PF Train |
 PF Large |
 EV3 Large |
 EV3 medium |
 PUP Train |
 PUP medium |
 Boost ext. |
 Boost int. |
 Control+ L |
 Control+ XL |
 Control+ XL |
 Control+ XL |
| 57g | 42g | 82g | 39g | 57g | 34g | 43g | – | 53g | 76g | 49g | 71g |
Der 43.362 Motor entspricht dem 71.427 Motor und ist 30% leichter. Dies
ist generell ein Vorteil, außer, wenn der Motor als Gegengewicht dienen
soll.
Leerlauf-Eigenschaften
Prüfbedingungen:
Motor wird durch eine variable, geregelte Stromversorgung gespeist. Ein
Strommessgerät misst den Strom, der durch durch den Motor wandert, ein Voltmeter
überwacht die Spannung. Die Drehzahl wird durch einen RCX mit einem Lichtsensor
ausgestattet gemessen.
| 9 V supply | 2838 |
2986 |
71427 |
43362 |
5292 |
47154 |
NXT |
E-Motor |
PF Medium |
PF XL |
9V Train |
RC Train |
|
Drehzahl |
4100 U/min | 35 U/min | 360 U/min | 340 U/min | 1300 U/min | 460 U/min | 170 U/min | 780 U/min | 405 U/min | 220 U/min | 2000 U/min | 2000 U/min |
| Leerlaufstrom | 35 mA | 6 mA | 3.5 mA | 9 mA | 160 mA | 31 mA | 60 mA | 17.5mA | 65 mA | 80 mA | 90mA | 90mA |
| 9 V supply | PF Train |
PF Large |
EV3 Large |
EV3 Medium |
PUP Train |
PUP medium |
Boost ext. |
Boost int. |
Control+ L |
Control+ XL |
Spike-M |
Spike-L |
|
Drehzahl |
1900 U/min | 390 U/min | 175 U/min | 260 U/min | 1760 U/min | 380 U/min | 255 U/min | 350 U/min | 315 U/min | 330 U/min | 228 U/min | 213 U/min |
| Leerlaufstrom | 90mA | 120mA | 60mA | 80mA | 100 mA | 60 mA | 41 mA | 140 mA | 120 mA | 60 mA | 100 mA | 110 mA |
43362 hat einen höheren Leerlaufstrom als 71.427, wahrscheinlich durch höhere
innere Reibung verursacht. 47154 hat einen relativ hohe Leerlauf-Strom, wegen
der 5-Stufen Getriebeuntersetzung. Aber es nutzt große Zahngetriebe in den
letzten Stadien, wahrscheinlich noch viel mehr, als die robuste 2-stufige,
Dünn-Zahn 71427/43362 Innenverzahnung. Der 5292 hat auch einen sehr hohen
Leerlaufstrom, auch hier wieder durch innere Reibung verursacht. Dies erklärt
auch den Bruch in seiner Geschwindigkeit / Spannungs-Kurve.
Wie für DC-Motoren üblich, ist die Umdrehungsgeschwindigkeit proportionnal
zur Spannung, die an ihnen angewendet wird, dieses kann auf den Diagrammen unten
gesehen werden. Der Leerlaufstrom hängt wenig von der Spannung ab.

Blockierende Eigenschaften
Die blockierende
Stromaufnahme ist schlicht und einfach mit Motor-Achs-Welle von Hand gehalten
gemessen. Das blockierende
Drehmoment wird durch das maximale Gewicht, das von der Maschine gehoben werden
kann, im Folgenden beschrieben. Bitte beachten,
dass die Stillstand-Drehmoment-Maßnahme sehr ungenau ist (dies gilt vor allem
für 5292 Motor)
| 9 V supply | 2838 |
2986 |
71427 |
43362 |
5292 |
47154 |
NXT |
E-Motor |
PF Medium |
PF XL |
9V Train |
RC Train |
|
Blockierte Drehkraft |
0.85 Ncm | 1.6 Ncm | 6 Ncm | 5.5 Ncm | 12 Ncm | 6 Ncm | 50 Ncm | 3.4Ncm | 11 Ncm | 40 Ncm | 2.8 Ncm | 1.7 Ncm |
| Blockierte Stromaufnahme | 700 mA | 80 mA | 360 mA | 340 mA | 3.2 A | 580 mA | 2 A | 410 mA | 850 mA | 1.8 A | 950 mA | 750 mA |
| 9 V supply | PF Train |
PF Large |
EV3 Large |
EV3 Medium |
PUP Train |
PUP medium |
Boost ext. |
Boost int. |
Control+ L |
Control+ XL |
Spike-M |
Spike-L |
|
Blockierte Drehkraft |
3.6 Ncm * | 18 Ncm | 43 Ncm | 15 Ncm | 2.9 N.cm * | 11 N.cm ** | 9.5 N.cm ** | 15.8 N.cm | 26 N.cm *** | 22 N.cm *** | 13.5 N.cm | 33.5 N.cm |
| Blockierte Stromaufnahme | 1.3 A * | 1.3 A | 1.8 A | 780 mA | 1.1 A * | 0.8 A ** | 450 mA ** | 1050 mA | 1.4 A *** | 1.1 A *** | 0.85 A | 1.8 A |
Achte darauf, in einem nicht zu langem Zeitraum den blockierten Zustand zu
nutzen, die Kraft die ins Motorgehäuse abgeführt ist, ist recht hoch (6 Watt für
2838, 3 W für 71427) und führt zu einem raschen Temperaturanstieg.
Beachte, dass 71427 und 43362 Motoren, mit einem Überlastungsschutz ausgestattet
ist, und gegen Durchbrennen geschützt sein sollte (nicht getestet !!!).
5292 Motor ist wahrscheinlich auch geschützt. Der
47154
Schutz kann leicht durch das klare Gehäuse betrachtet werden.
Der NXT-Motor wird auch durch einem
Überlastungsschutz
geschützt (Raychem RXE065 oder Bourns MF-R065).
Das bedeutet, dass die hohe 2A Stromaufnahme (und das damit verbundene
Drehmoment) nur für wenige Sekunden aufrechterhalten werden kann.
Dasselbe gilt für die
Power Functions XL-Motoren.
(*) Die
Zugmotoren enthalten auch Temperaturbegrenzungen. Für den
PF-Zugmotor löst dieser Schutz zu schnell aus und verhindert die direkte Messung
des Blockierstroms. Diese Werte wurden durch
Extrapolation erhalten.
(**) Der Powered Up Medium-Motor und der
Boost-Außenmotor verfügen über eine Schnellauslöse-Thermistorbegrenzung, die bei
einem relativ geringen Strom (ca. 400 mA) auszulösen scheint und eine direkte
Messung des Blockierstroms und des Drehmoments verhindert.
Diese Werte werden also durch Extrapolation erhalten
(und sind für Powered Up-Medium-Motoren, die nur mit der Hälfte des
Stillstandsstroms gespeist werden können, nicht wirklich von Bedeutung).
(***) Der Blockierstrom von Control + -Motoren wurde auch durch Extrapolation
erhalten.
Die Eisenbahnmotoren enthalten auch Thermale Beschränkungen. Für den
PF-Eisenbahnmotor löst dieser Schutz zu schnell aus und verhindert direktes
messen des blockierten Stroms. Diese Werte werden durch Extrapolation erhalten.
Hier ist das Equipment, welches verwendet wurde, um die Motoren unter
Belastung zu messen. Elektrische Leistung wird mit Voltmeter und Amperemeter
gemessen. Die Mechanische Leistung vom Motor wird aus der Zeit genutzt, um das
Gewicht von einer gewissen Höhe zu heben (5 Zylinderdrehungen – die ersten zwei
Runden werden nicht gezählt um die anfängliche Beschleunigung zu beseitigen).
Drehmoment wird von Gewicht und Zylinderradius errechnet.
Zylinder befindet sich direkt an der Achswelle vom Motor, mit Ausnahme von 2838,
wo ein eine 1 / 5 Untersetzung verwendet wurde. Die
Reibung beim 2838 kann etwas an der Effizienz bewirkt haben, aber trotzdem diese
Verzahnung ist für die meisten Anwendungen erforderlich. Die
Drehkraft, die für diesen Motor angezeigt wird, behebt die Zahnradverkleinerung.
Der schnelle Motor 5292 wurde auch mit einer 1/3 Zahnradverkleinerung
gemessen.

In 2010
habe ich mein Test-Setup auf die NXT-Plattform aktualisiert:
Mindsensors
startete den
PowerMeter Sensor, der dem NXT erlaubt direkt die Spannung und den aktuellen
Verbrauch zu messen am Motor. Ein Lichtsensor vor einem
Schwarz-Weiß-Zylinder liest die Anzahl der Umdrehungen der Seilwinde, und die
benötigte Zeit, um das Gewicht zu heben. Unter Verwendung des Brettes mit zwei
elektromechanischen Relais, kann der NXT den Motor im Versuch steuern: laufen,
schwimmen oder bremsen (dieser Zustand wird später verwendet, um zu verhindern,
dass die Last am Ende brutal auf den Boden schlägt). Ein Labornetzgerät wird für
den Antrieb des Motors im Test verwendet.
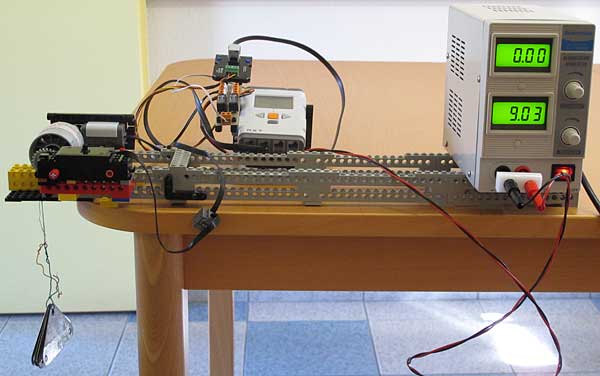
Das Foto untenzeigt den NXT mit
PowerMeter sensor Und Motor-Control-Board.
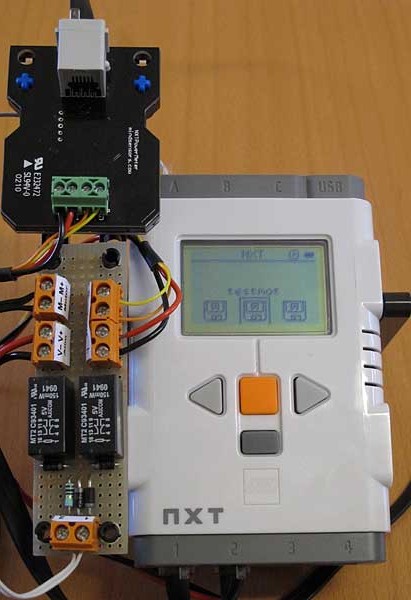
Hier ist ein Screenshot des
NXC Motor Test-Programms:
2838 |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 6 V | 0.45 Ncm | 580 U/min | 0.32 A | 0.27 W | 1.9 W | 14 % |
| 7 V | 0.45 Ncm | 1000 U/min | 0.32 A | 0.46 W | 2.3 W | 20 % |
| 9 V | 0.45 Ncm | 2000 U/min | 0.32 A | 0.9 W | 3 W | 31 % |
| 12 V | 0.45 Ncm | 3300 U/min | 0.33 A | 1.5 W | 4 W | 39 % |
71427 |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5 V | 2.25 Ncm | 57 U/min | 0.12 A | 0.13 W | 0.54 W | 24 % |
| 7 V | 2.25 Ncm | 160 U/min | 0.12 A | 0.38 W | 0.85 W | 45 % |
| 9 V | 2.25 Ncm | 250 U/min | 0.12 A | 0.58 W | 1.1 W | 54 % |
| 12 V | 2.25 Ncm | 375 U/min | 0.12 A | 0.88W | 1.5 W | 61 % |
43362 |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5 V | 2.25 Ncm | 50 U/min | 0.12 A | 0.12 W | 0.54 W | 22 % |
| 7 V | 2.25 Ncm | 140 U/min | 0.12 A | 0.33 W | 0.85 W | 39 % |
| 9 V | 2.25 Ncm | 219 U/min | 0.12 A | 0.51 W | 1.1 W | 47 % |
| 12 V | 2.25 Ncm | 333 U/min | 0.12 A | 0.77W | 1.5 W | 54 % |
47154 |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5 V | 2.25 Ncm | 90 U/min | 0.19 A | 0.21 W | 0.85 W | 24 % |
| 7 V | 2.25 Ncm | 210 U/min | 0.19 A | 0.49 W | 1.33 W | 37 % |
| 9 V | 2.25 Ncm | 315 U/min | 0.19 A | 0.74 W | 1.7 W | 43 % |
| 12 V | 2.25 Ncm | 468 U/min | 0.19 A | 1.1 W | 2.3 W | 48 % |
2986 |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 9 V | 1.28 Ncm | 16 U/min | 0.04 A | 0.021 W | 0.36 W | 16 % |
| 12 V | 1.28 Ncm | 28 U/min | 0.04 A | 0.038W | 0.48 W | 28 % |
5292 |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 3 V | 2.48 Ncm | 120 U/min | 0.76 A | 0.31 W | 2.28 W | 13 % |
| 4.5 V | 2.48 Ncm | 340 U/min | 0.77 A | 0.88 W | 3.46 W | 25 % |
| 7 V | 2.48 Ncm | 670 U/min | 0.78 A | 1.74 W | 5.46W | 32 % |
| 9 V | 2.48 Ncm | 920 U/min | 0.78 A | 2.38 W | 7.2 W | 33 % |
NXT |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5 V | 16.7 Ncm | 33 U/min | 0.6 A | 0.58 W | 2.7 W | 21.4 % |
| 7 V | 16.7 Ncm | 82 U/min | 0.55 A | 1.44 W | 3.85 W | 37.3 % |
| 9 V | 16.7 Ncm | 117 U/min | 0.55 A | 2.03 W | 4.95 W | 41 % |
| 12 V | 16.7 Ncm | 177 U/min | 0.58 A | 3.10 W | 6.96 W | 44.5 % |
PF Medium |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5 V | 3.63 Ncm | 73 U/min | 0.28 A | 0.27 W | 1.26 W | 22 % |
| 7 V | 3.63 Ncm | 185 U/min | 0.29 A | 0.70 W | 2.03 W | 34 % |
| 9 V | 3.63 Ncm | 275 U/min | 0.31 A | 1.04 W | 2.79 W | 37 % |
| 12 V | 3.63 Ncm | 405 U/min | 0.32 A | 1.53 W | 3.84 W | 40 % |
PF XL |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5 V | 14.5 Ncm | 43 U/min | 0.52 A | 0.65 W | 2.34 W | 28 % |
| 7 V | 14.5 Ncm | 100 U/min | 0.54 A | 1.51 W | 3.78 W | 40 % |
| 9 V | 14.5 Ncm | 146 U/min | 0.55 A | 2.21 W | 4.95 W | 45 % |
| 12 V | 14.5 Ncm | 214 U/min | 0.56 A | 3.24 W | 6.72 W | 48 % |
9V Train |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5 V | 0.90 Ncm | 375 U/min | 0.40 A | 0.36 W | 1.80 W | 20 % |
| 6 V | 0.90 Ncm | 667 U/min | 0.39 A | 0.62 W | 2.34 W | 27 % |
| 7.5 V | 0.90 Ncm | 1071 U/min | 0.38 A | 0.99 W | 2.85 W | 35 % |
| 9 V | 0.90 Ncm | 1250 U/min | 0.38 A | 1.11 W | 3.42 W | 33 % |
RC Train |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 3 V | 0.85 Ncm | – | – | – | – | – |
| 4.5 V | 0.85 Ncm | – | – | – | – | – |
| 6 V | 0.85 Ncm | 171 U/min | 0.43 A | 0.15 W | 2.59 W | 6 % |
| 7.5 V | 0.85 Ncm | 549 U/min | 0.43 A | 0.49 W | 3.23 W | 15 % |
| 9 V | 0.85 Ncm | 990 U/min | 0.43 A | 0.88 W | 3.91 W | 22 % |
| 10.5V | 0.85 Ncm | 1323 U/min | 0.44 A | 1.18 W | 4.63 W | 25 % |
| 12 V | 0.85 Ncm | 1683 U/min | 0.45 A | 1.50 W | 5.43 W | 27 % |
PF Train |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 3 V | 0.85 Ncm | 135 U/min | 0.35 A | 0.12 W | 1.05 W | 11% |
| 4.5V | 0.85 Ncm | 468 U/min | 0.36 A | 0.42 W | 1.62 W | 26 % |
| 6 V | 0.85 Ncm | 792 U/min | 0.37 A | 0.71 W | 2.22 W | 32 % |
| 7.5 V | 0.85 Ncm | 1107 U/min | 0.38 A | 0.99 W | 2.85 W | 35 % |
| 9 V | 0.85 Ncm | 1458 U/min | 0.38 A | 1.30 W | 3.42 W | 38% |
| 10.5V | 0.85 Ncm | 1782 U/min | 0.39 A | 1.59 W | 4.10 W | 39 % |
| 12 V | 0.85 Ncm | 2124 U/min | 0.40 A | 1.90 W | 4.80 W | 40 % |
E-Motor |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5V | 1.32 Ncm | 63 U/min | 0.17 A | 0.087 W | 0.76 W | 11 % |
| 6 V | 1.32 Ncm | 186 U/min | 0.17 A | 0.26 W | 1.02W | 25 % |
| 7.5 V | 1.32 Ncm | 300 U/min | 0.17 A | 0.42 W | 1.27 W | 33 % |
| 9 V | 1.32 Ncm | 420 U/min | 0.18 A | 0.58 W | 1.62 W | 36 % |
| 10.5V | 1.32 Ncm | 520 U/min | 0.18 A | 0.72 W | 1.89 W | 38 % |
| 12 V | 1.32 Ncm | 640 U/min | 0.18 A | 0.89 W | 2.16 W | 41 % |
PF-large |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5V | 6.48 Ncm | 67 U/min | 0.46 A | 0.46 W | 2.07 W | 22 % |
| 6 V | 6.48 Ncm | 138 U/min | 0.47 A | 0.94 W | 2.82 W | 33 % |
| 7.5 V | 6.48 Ncm | 203 U/min | 0.48 A | 1.38 W | 3.60 W | 38 % |
| 9 V | 6.48 Ncm | 272 U/min | 0.49 A | 1.85 W | 4.41 W | 42 % |
| 10.5V | 6.48 Ncm | 338 U/min | 0.49 A | 2.30 W | 5.15 W | 44 % |
| 12 V | 6.48 Ncm | 405 U/min | 0.50 A | 2.75 W | 6.00 W | 46 % |
EV3 large |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5 V | 17.3 Ncm | 24 U/min | 0.69 A | 0.43 W | 3.10 W | 14 % |
| 6 V | 17.3 Ncm | 51 U/min | 0.69 A | 0.92 W | 4.14 W | 22 % |
| 7.5 V | 17.3 Ncm | 78U/min | 0.69 A | 1.41 W | 5.17 W | 27 % |
| 9 V | 17.3 Ncm | 105 U/min | 0.69 A | 1.90 W | 6.21 W | 31 % |
| 10.5 V | 17.3 Ncm | 132 U/min | 0.69 A | 2.39 W | 7.24 W | 33 % |
| 12 V | 17.3 Ncm | 153 U/min | 0.69 A | 2.77 W | 8.28 W | 33 % |
EV3-medium |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5V | 6.64 Ncm | 24 U/min | 0.35 A | 0.17 W | 1.57 W | 10 % |
| 6 V | 6.64 Ncm | 72 U/min | 0.35 A | 0.50 W | 2.10 W | 24 % |
| 7.5 V | 6.64 Ncm | 120 U/min | 0.35 A | 0.83 W | 2.62 W | 32 % |
| 9 V | 6.64 Ncm | 165 U/min | 0.37 A | 1.15 W | 3.33 W | 34 % |
| 10.5V | 6.64 Ncm | 207 U/min | 0.37 A | 1.44 W | 3.88 W | 37 % |
| 12 V | 6.64 Ncm | 249 U/min | 0.37 A | 1.73 W | 4.44 W | 39 % |
PUP Train |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5V | 0.88 N.cm | 237 U/min | 0.36 A | 0.22 W | 1.61 W | 13 % |
| 6 V | 0.88 N.cm | 540 U/min | 0.38 A | 0.50 W | 2.30 W | 22 % |
| 7.5 V | 0.88 N.cm | 855 U/min | 0.40 A | 0.79 W | 2.99 W | 26 % |
| 9 V | 0.88 N.cm | 1242 U/min | 0.41 A | 1.15 W | 3.73 W | 31 % |
| 10.5V | 0.88 N.cm | 1539 U/min | 0.43 A | 1.42 W | 4.50 W | 32 % |
| 12 V | 0.88 N.cm | 1872 U/min | 0.44 A | 1.73 W | 5.26 W | 33 % |
PUP medium |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5V | 4.08 N.cm | 66 U/min | 0.29 A | 0.28 W | 1.29 W | 22 % |
| 6 V | 4.08 N.cm | 135 U/min | 0.29 A | 0.56 W | 1.73 W | 33 % |
| 7.5 V | 4.08 N.cm | 201 U/min | 0.30 A | 0.86 W | 2.22 W | 39 % |
| 9 V | 4.08 N.cm | 270 U/min | 0.30 A | 1.15 W | 2.66 W | 43 % |
| 10.5V | 4.08 N.cm | 327 U/min | 0.30 A | 1.40 W | 3.18 W | 44 % |
| 12 V | 4.08 N.cm | 396 U/min | 0.31 A | 1.69 W | 3.74 W | 45 % |
Boost Ext. |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5V | 4.08 N.cm | 39 U/min | 0.18 A | 0.17 W | 0.82 W | 20 % |
| 6 V | 4.08 N.cm | 84 U/min | 0.18 A | 0.36 W | 1.09 W | 33 % |
| 7.5 V | 4.08 N.cm | 126 U/min | 0.19 A | 0.54 W | 1.43 W | 38 % |
| 9 V | 4.08 N.cm | 171 U/min | 0.19 A | 0.73 W | 1.72 W | 42 % |
| 10.5V | 4.08 N.cm | 213 U/min | 0.20 A | 0.93 W | 2.09 W | 44 % |
| 12 V | 4.08 N.cm | 255 U/min | 0.20 A | 1.09 W | 2.40 W | 45 % |
Boost Int. |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5V | 4.08 N.cm | 81 U/min | 0.33A | 0.35 W | 1.46 W | 24 % |
| 6 V | 4.08 N.cm | 141 U/min | 0.34 A | 0.60 W | 2.06 W | 29 % |
| 7.5 V | 4.08 N.cm | 201 U/min | 0.35 A | 0.86 W | 2.66 W | 32 % |
| 9 V | 4.08 N.cm | 264 U/min | 0.37 A | 1.13 W | 3.37 W | 33 % |
| 10.5V | 4.08 N.cm | 327 U/min | 0.38A | 1.40 W | 3.98 W | 35 % |
| 12 V | 4.08 N.cm | 384 U/min | 0.39 A | 1.64 W | 4.67 W | 35 % |
Control+ L |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5V | 8.81 N.cm | 36 U/min | 0.49 A | 0.33 W | 2.21 W | 15 % |
| 6 V | 8.81 N.cm | 93 U/min | 0.48 A | 0.86 W | 2.88 W | 30 % |
| 7.5 V | 8.81 N.cm | 141 U/min | 0.51 A | 1.30 W | 3.81 W | 34 % |
| 9 V | 8.81 N.cm | 198 U/min | 0.52 A | 1.83 W | 4.70 W | 39 % |
| 10.5V | 8.81 N.cm | 255 U/min | 0.52 A | 2.35 W | 5.44 W | 43 % |
| 12 V | 8.81 N.cm | 312 U/min | 0.53 A | 2.88 W | 6.37 W | 45 % |
Control+ XL |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5V | 8.81 N.cm | 33 U/min | 0.45 A | 0.30 W | 2.03 W | 15 % |
| 6 V | 8.81 N.cm | 93 U/min | 0.46 A | 0.86 W | 2.75 W | 31 % |
| 7.5 V | 8.81 N.cm | 147 U/min | 0.46 A | 1.36 W | 3.50 W | 39 % |
| 9 V | 8.81 N.cm | 198 U/min | 0.47 A | 1.83 W | 4.16 W | 44 % |
| 10.5V | 8.81 N.cm | 252 U/min | 0.47 A | 2.33 W | 4.95 W | 47 % |
| 12 V | 8.81 N.cm | 306 U/min | 0.47 A | 2.82 W | 5.70 W | 50 % |
 Spike M |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5V | 4.48 N.cm | 24 U/min | 0.29 A | 0.11 W | 1.29 W | 9 % |
| 6 V | 4.48 N.cm | 63 U/min | 0.28 A | 0.30 W | 1.67 W | 18 % |
| 7.2 V | 3.5 N.cm | 135 U/min | 0.28A | 0.49 W | 2.02 W | 25 % |
| 7.5 V | 4.48 N.cm | 105 U/min | 0.29 A | 0.49 W | 2.16 W | 23 % |
| 9 V | 4.48 N.cm | 138 U/min | 0.30 A | 0.65 W | 2.67 W | 24 % |
| 10.5V | 4.48 N.cm | 180 U/min | 0.31 A | 0.84 W | 3.24 W | 26 % |
| 12 V | 4.48 N.cm | 213 U/min | 0.32 A | 1.00 W | 3.82 W | 26 % |
 Spike L |
Drehkraft | Drehzahl | Stromstärke | Mechanische Kraft |
Elektrische Kraft |
Wirkungsgrad |
| 4.5V | 8.47 N.cm | 48 U/min | 0.41 A | 0.43 W | 1.86 W | 23 % |
| 6 V | 8.47 N.cm | 84 U/min | 0.43 A | 0.75 W | 2.59 W | 29 % |
| 7.2 V | 8 N.cm | 135 U/min | 0.43 A | 1.13 W | 3.10 W | 37 % |
| 7.5 V | 8.47 N.cm | 126 U/min | 0.43 A | 1.12 W | 3.25 W | 34 % |
| 9 V | 8.47 N.cm | 156 U/min | 0.44 A | 1.38 W | 3.98 W | 35 % |
| 10.5V | 8.47 N.cm | 198 U/min | 0.46 A | 1.76 W | 4.82 W | 36 % |
| 12 V | 8.47 N.cm | 234 U/min | 0.46 A | 2.08 W | 5.47 W | 38 % |
Die Geschwindigkeit von 43362 Motor ist rund 12% niedriger als die
Geschwindigkeit von 71.427. Obwohl dies im Bereich von Variationen von Steve
Baker aus einer Reihe von neun 71427 Motoren, meine Messungen an drei 71427 und
zwei 43362 zeigten die 12% Differenz zwischen den beiden Gruppen.
Die RC-Zug Motor hatte einen schlechten Wirkungsgrad und liefert wenig
Drehmoment bei niedriger Spannung (er war nicht in der Lage, sich unter 6V mit
0,85 Ncm zu bewegen). Der PF Zug Motor hat eine deutlich verbesserte Effizienz,
sogar besser als der alte 9V Zug Motor.
Geschwindigkeit und Stromstärke vs. Drehkraft
(Charts wurden aktualisiert am 4. Juli 2012: 5292, die Motorwerte waren
falsch))
Diese Diagramme stellen eine
Zusammenfassung der oberen Kurven dar. Das Aussagekräftigste zeigt die
verschiedenen Motoren, sortiert nach Höchstleistung von 9V.
Weil die Drehzahl-/Drehmoment-Kurve linear ist, liefert ein Motor
Maximalleistung, wenn die Ladung ihn verlangsamt bis zur Hälfte der
Geschwindigkeit ohne Ladung..
Im folgenden Chart sind die Motoren nach Drehmoment und ohne
Last-Drehzahl sortiert (natürlich hängt dies stark vom internen
Untersetzungsgetriebe der Motoren ab!!!). Das Drehmoment-Diagramm listet
Drehmomente beim Halb-Geschwindigkeits-Punkt.
Schutzmaßnahmen
71427 and 43362
Motoren sind von
Manipulationen durch zwei Geräte geschützt:
-
ein
PTC thermistance (hier ein Epcos B1056).
Dieser Widerstand ist in Serie mit dem Motor montiert, hat einen
niedrigen Wert, wenn es kalt ist (etwa 1,7 Ohm), schnell wachsend, wenn
die Temperatur steigt.
Wenn ein großer Strom durch den Motor fließt, steigt die Eigenerwärmung
und der Widerstands-Wert, so wird der Strom durch Spannungsabfall
thermisch begrenzt.- eine
BZW04-15B, bidirektionale Transient-Voltage-Suppressor-Diode. Diese
Diode schützt den RCX vor großen Spannungsspitzen, die durch den Motor
erzeugt werden könnten. Aber es ist auch untersagt, mehr als 15V an den
Motor zu schicken …
Ein ähnlicher Schutz ist in 47154 Motoren integriert, wie auf diesem
Foto zu sehen.
Der NXT-Motor ist auch mit einem
PTC thermistance und Transient Voltage Suppressor-Diode geschützt (D4
auf diesem
Bild).Die Ausgänge des RCX sind auch vor Überlastung geschützt: der verwendete
Motor-Chip-Treiber (Melexis MLX10402 – Datenblatt) hat eine Strombegrenzung
auf 500 mA eingestellt, und eine thermische Abschaltung, welche die
Ausgabeabschaltet, wenn die Temperatur zu sehr ansteigt.
Hier
ist die Kurven-Einschränkung, die ich an einem RCX gemessen habe.
Er wurde von einem externen geregelten Netzteil mit Spannung versorgt und
getestet bei 9V (6 Alkaline-Batterien) und 7,2 V (6 NiCd-oder NiMH-Akkus).
Es besteht ein erheblicher Spannungsabfall vor Erreichen der
Strombegrenzung (500 mA). Wenn ein Motor zum Stillstand gekommen ist 71427
erhält er nur etwa 7V bei 300 mA, während zwei 71427 oder eine einzelne 2838
fast eine parallele Strombegrenzung erreichen (5,5 V / 430mA).Wenn also alle drei Ausgänge kurzgeschlossen sind, wird
insgesamt mehr als 1,5 A Strom verbraucht, höchstens die Sicherung schützt
den RCX. Diese Bedingung sollte unter normalen Umständen nicht passieren,
auch wenn alle drei Ausgänge mit 2 festgefahrenen 71427 Motoren bestückt
sind …
Ich hatte auch einen Blick in die aktuelle Stromaufnahme des 8475 RC Race Buggy.
Der Haupt-Ausgang treibt parallel zwei Motoren 5292 an, die mehr als 3A
verbrauchen, wenn diese geblockt werden.
Und in der Tat scheint es eine Strombegrenzung von etwa 4A zu geben, und eine
thermische Abschaltung wie bei dem RCX Motortreiber.
Maximale mechanische Leistung vom RCX-Ausgang erhalten
Mit einer unlimitierten Stromversorgung (frische Batterien zum Beispiel),
sorgt ein DC-Motor für maximale mechanische Leistung, wenn die Hälfte des
geblockten Drehmoments geladen ist. Dieses ist auch die Last, in der die
Drehzahl die Hälfte der Leerlaufgeschwindigkeit ist (diese nimmt ideale
Bedingungen wie niedrige interne Friktion an, aber entsprechend den Lastkurven,
die oben gezeigt werden, ist diese genau genug, um nützlich zu sein).
Aber mit dem RCX Ausgang tritt etwas Spannungsabfall auf, und die
Beschränkung der Stromaufnahme kann auch innen ausgelöst sein, wenn zwei Motoren
unter großer Last auf dem gleichen Ausgang angesprochen werden.
Hier sind die Kurven, die die mechanische Leistung im Vergleich zum
geladenen Drehmoment für verschiedene Motor-Kombinationenaufzeigen. Der RCX
wurde extern von einem geregelten Netzteil mit Spannung versorgt, und ich
habe die mechanische Leistung bei 9V (entspricht 6 Alkaline-Batterien) und
7,2 V (6 NiCd-oder NiMH-Akkus) gemessen.
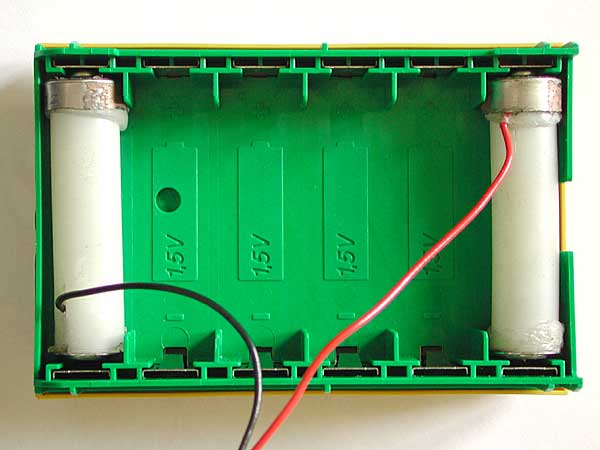 |
RCX angetrieben durch eine externe geregelte Stromversorgung durch zwei gefälschte Batterien. Achtung: Ich übernehme keine Haftung wenn der RCX mit falscher Spannung betrieben wird! |
 |
Die gefälschten Batterien werden mit den abgesägten Enden der alten Alkaline-Batterien mit Heißleimstäben verschmolzenCaution: Batterien enthalten gefährliche Chemikalien, die gefährlich sein können für die Gesundheit. Öffne diese auf eigenes Risiko und nur wenn Du weißt, was du tust! |
Man kann anhand der Kurven sehen, dass der RCX mit NiMH-Akkus betrieben
werden kann. Die niedrigere Spannung sorgt für 40% niedrigeres Drehmoment.
Einzel Motor Kurven
Paralelle Motor Kurven
Zwei identische Motoren werden vom selben RCX angetrieben und die Wellen
werden mechanisch miteinander verbunden.
Wegen der höheren Stromaufnahme von 47154 und 2838 Motoren, wird
die Verwendung von zwei Motoren auf dem gleichen RCX Ausgang nicht empfohlen, da
die gegenwärtigen RCX Beschränkung übersteigen, wenn sie schwer gefordert
werden. Bei 0.8 W liefern zwei 71427 sicher die größte mechanische Energie von
allen.
Zusammenfassung
Jeder dieser Motoren hat einzigartige Eigenschaften, die es mehr oder weniger
verwendbar für verschiedene Anwendungen macht.
-
- Mikromotor 2986 ist am besten, wenn Raum und Gewicht am Wichtigsten
sind. Aber seine mechanische Leistung ist sehr gering. - Technic Motor 2838 ist eine echter Leistungsmotor, mit schlechtem
Wirkungsgrad, aber er kann 30% mehr Leistung als Minimotor liefern. - Minimotor 71427 ist vermutlich der beste Artist der gesamten
Palette. - Der neue 43362 entspricht in etwa 71.427, mit leicht verminderten
Leistungen. Aber sein geringes Gewicht kann ein Segen für viele
Anwendungen sein.
Klarer Fall 47154 bietet eine höhere mechanische Energie als 71.427,
aber für den Preis eines etwas niedrigeren Wirkungsgrad.
RC Race Buggy Motor 5292 ist wirklich mächtig, aber benötigt eine
Versorgungsspannung bis zur Aufgabe.
Es ist keine gute Idee, ihn mit einem RCX amit 500 mA Strombegrenzung zu
verwenden, er wird es nicht zulassen, die Kraft zu entfesseln …
NXT-Motor liefert ein hohes Drehmoment dank seiner internen
Untersetzungsgetriebes.
Aus diesem Grund dreht er auch langsamer und der Wirkungsgrad ist etwas
reduziert.
Dieser Motor könnte an einem RCX dank eines Adapterkabels angeschlossen
werden, aber das ist nicht für die Verwendung auf einem RCX empfohlen,
da der hohe Strom den sie verbrauchen können, zu viel ist für den RCX
mit 500 mA Strombegrenzung.
- Mikromotor 2986 ist am besten, wenn Raum und Gewicht am Wichtigsten
|
Vorsicht! Obwohl die Motoren mit einer |
LEGO® Power Functions Servomotor
Hier geht es zur Homepage von Philo.
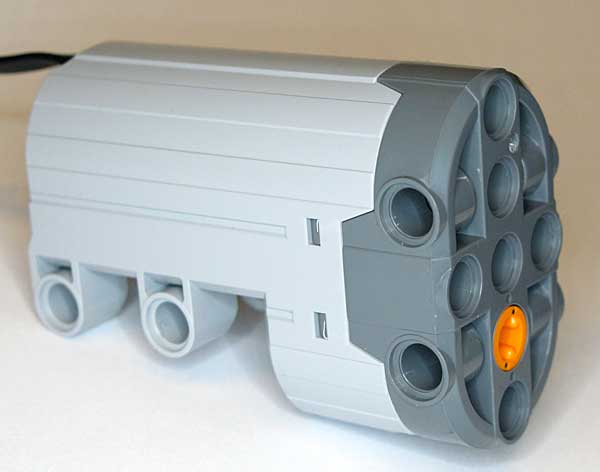
Dieses Power Functions Element erschien zuerst 2012
Rock Crawler set (9398), um zu lenken.
Wie RC
Servos, dreht
er
innerhalb eines begrenzten Bereiches
(-90 ° bis +90 °) in Reaktion auf
ein Steuersignal. Als ein
Power
Functions Mitglied,
ist es vollständig
in
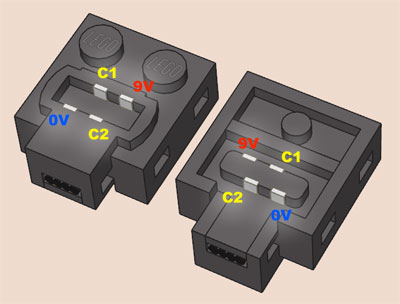
diesem System integriert, und erhält
seine Position durch die C1/C2 Linien,
und
seine Kraft aus den
Versorgungsleitungen.
An einem normalen Motor,
C1/C2 steuern die
Motordrehzahl,
hier
setzen sie die Winkelposition
der Welle.
Dieser Artikel
beschreibt das Verhalten des
PF Servomotor und wie gut
er es erfüllt.
Schau auch diese
excellente Video Präsentation von Sariel.
Versuchsaufbau
Der Versuchsazfbau ist ähnlich dem, wo die Motoren verglichen wurden.
Der Servo wird
von einem Labor Netzteil mit Strom
versorgt, durch einen Mindsensors
PowerMeter sensor um den Strom zu messen Ein Hightech
Angle sensorüberwacht den Winkel.
Gewichtanheben
stellt die Last dar – mit
einem kleinen Nachteil, die Last
wird immer in der gleichen
Richtung ausgeübt…
C1/C2
Linien des Servo
werden direkt verbundenum den
NXT Anschluss B zu messen
, ermöglicht
eine vollständige Kontrolle des Servo
durch Variation „Leistungspegel“
(eigentlich PWM
duty cycle) an diesem Port.
Hier ist ein
Beispiel der NXC
Programme, die
Philo
bei den Tests verwendete.
Proportional?
Einer der ersten Frage, die gestellt
wurde, wenn der Servo
erschien, war: „Ermöglicht er proportionale
Wirkung,
oder nur rechts / Mitte
/ links Positionierung?“
efferman hatte bald ein
Video gepostet, welches eine proportionale Steuerung zeigt, wenn man den
PF speed controller
nutzt. Aber
dieses Teil erzeugt nur einzelne
Fahrstufen – was passiert
zwischen den Schritten?
Philos Versuchsaufbau nutzt den NXT um den C1/C2 Linien zu
erlauben, jeden Wert zwischen -100% and +100% zu verwenden,
und wie in dem
Video unten gezeigt, weist der
PF Servo nur
sieben Positionen auf jeder
Seite der Neutralen.
Verhalten des Servomotors
Der Stellmotor
ist mit dem folgenden Skript
versehen:
-
-
beginnen wir mit voller
CCW Position (PWM
Satz bei voller
vorne, Servo mechanischen
Anschlag, Lastgewicht bei niedrigeren
Position). Winkel etwa
0 °- bei
t = 2s, wir
senden
dem
Servo den Befehl,
um die volle CW
Position zu gehen (PWM
setzt
eine
volle Umgekehrdrehung. Lastgewicht
wird an oberer Position
gehoben). Winkel etwa
180 ° - bei t = 4s, senden wir dem Servo den Befehl in eine neutrale
Position zu drehen. (PWM set at 0°) - bei t = 6s, wir gehen wieder auf volle CCW-Position.
- bei t = 8s, zurück zu neutral.
No load
4.3 Ncm
8.5 NcmWir
sehen aus diesen Diagrammen, die
– wie erwartet
-wie die Leistung durch
Servomotor
steigt mit dem Drehmoment
Spitzenstrom at 8.5Ncm erreicht eine Last von 600mA.Während
der Servo bald
eine Position erreicht,
in der Nähe des Ziels, kämpft er mehr und
mehr um die erhöhte Last zu erreichen.
Shaft angle curves under various loadsIn
diesem Diagramm habe ich
die drei Wellenwinkel
Kurven
dargestellt unter verschiedenen Belastungen.
Wir
sehen, dass es eine kleine Pause zwischen
dem Start und des
Rotationsstartschrittes gibt(ungefähr 0.12s).Es dauert
dann 0.12s um um 90° zu rotieren. Die komplette Reaktionszeit ist
ca. 0.25s für eine 90° Drehung, 0.36s für eine volle 180° Drehung.
Es gibt
wenig Drehzahländerung
mit erhöhter Last, um
eine gute Annäherung an
den Zielwinkel zu
erreichen,
die endgültige
Einschwingzeit erhöht sich deutlich.Wir
können auch zu sehen.,
dass der endgültige Winkel
von der Last
abhängt.
Ich weiß nicht, ob
dies durch schlechte
Regulierung verursacht wird, durch Spiel in
der Innenverzahnung des Servos
oder Elastizität in seinem eigenen
Prüfstand.
-
Überlastung
Wenn die Last
auf der Servowelle
weiter zunimmt, passieren neue Dinge,
wie auf den Kurven dargestellt.
Blaue Kurve
ist aktuell verbraucht wird,
rote Kurve Winkeländerung
im Leerlauf, als Referenz
erstellt.
Rosa
Kurve zeigt Wellenwinkel
bei Volllast.
12.8 Ncm, 9V supply.
Den
Zielwinkel zu erreichen dauert jetzt
viel länger, etwa 1,7
Sekunden, um von -90 ° bis
+90 ° zun erreichen.
Aber der wirkliche
Unterschied ist, dass das Servo nicht
auf dem Ziel-Winkel zu halten ist!
Sobald
der Zielwinkel erreicht ist,
sehen wir, dass die Belastung der
Welle zurückfährt
auf -90 ° Position.
Dies bedeutet,
dass, sobald der Servo
sein Ziel erreicht hat,
er nicht versucht seine Position zu korrigieren und zu halten wie es ein
regulärer Servo tun würde.
Und sehr wahrscheinlich
ist es nicht einmal
möglich, den Motor durch Kurzschluss abzubremsen
(oder
nur kurz).
Die Last kann
somit relativ leicht wieder
den
Servo zurück drehen, sobald die
innere Reibung überwunden wird.
12.8 Ncm, 7.2V supply.
Die obige Grafik
zeigt den gleichen
Schwerlast Test,
diesmal mit einer 7,2 V
Versorgungsspannung (die
Nennspannung 6 AA NiMH-Zellen)
durchgeführt.
Wir sehen, dass
selbst bei dieser geringen Spannung
der Servomotor sehr mächtig
ist (nur
die Hochlaufzeit
ist langsamer),
und
natürlich sehen wir das gleiche
wieder beim Antrieb durch die Last.
Eine andere Möglichkeit den Servomotor zu überlasten, ist seinen normalen Weg
zu blockieren.
+/- 45° blocked travel
In
der obigen Tabelle, legte ich zwei
Stationen auf jeder Seite der
Servowegbegrenzung auf + / -45 °.
Wir sehen, dass
nach einem kurzen normalen Zug
die
45 ° erreicht werden. (bei
niedrigem Strom, da keine äußere
Belastung),
der Servomotor trifft den
Anschlag.
Dort wird der
Strom auf den Maximalwert (900mA)
für eine kurze Zeit erhöht(weniger als
0.25s), dann versucht der Servo zu stoppen,
und bleibt
im Leerlauf, bis es
einen anderen Befehl erhält.Das
bedeutet, dass kein Schaden am Servo entsteht, wenn er versehentlich auf seinem
Weg blockiert wird – natürlich empfehle ich das nicht als gängige Praxis.